Hi! I’m Sayantan, a postdoctoral researcher at the Learning and Intelligent Systems (LIS) Lab led by Marc Toussaint at Technische Universität Berlin, Germany. My current research focuses on reinforcement learning and imitation learning in robotics. More specifically, I work on developing mechanisms for effective, resource-efficient, and long-term adaptation to out-of-distribution scenarios for robots.
I earned my PhD from Universität Innsbruck, Austria, under the supervision of Justus Piater, where I worked on continual learning for manipulation, learning from demonstration, and sim-to-real transfer. Previously, I completed my MSc (with distinction) at Universität Hamburg, Germany, working closely with Stefan Wermter.
If our interests align, feel free to reach out — I’d love to connect!
Selected Research
Please visit my Google Scholar profile for the full publication list.
S. Auddy, J. Hollenstein, M. Saveriano, A. Rodríguez-Sánchez, J. Piater
IEEE Transactions on Cognitive and Developmental Systems, 2026 (to appear).
Paper |
BibTeX
@article{auddy2026scalable,
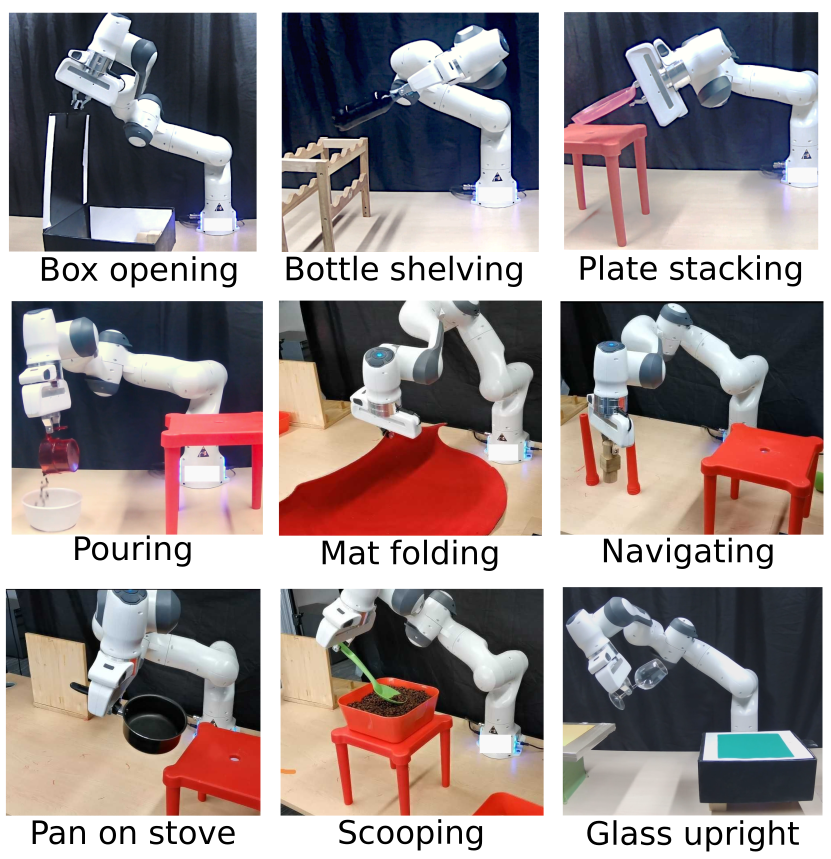
title={Scalable and Efficient Continual Learning from Demonstration via a Hypernetwork-generated Stable Dynamics Model},
author={Auddy, Sayantan and Hollenstein, Jakob and Saveriano, Matteo and Rodríguez-Sánchez, Antonio and Piater, Justus},
journal={IEEE Transactions on Cognitive and Developmental Systems},
year={2026},
note={To appear}
}
V. Lorentz, K. Wahba, S. Auddy, M. Toussaint, W. Hönig
Accepted at the International Conference on Robotics and Automation (ICRA), 2026.
Paper |
BibTeX
@article{crazymarl2025,
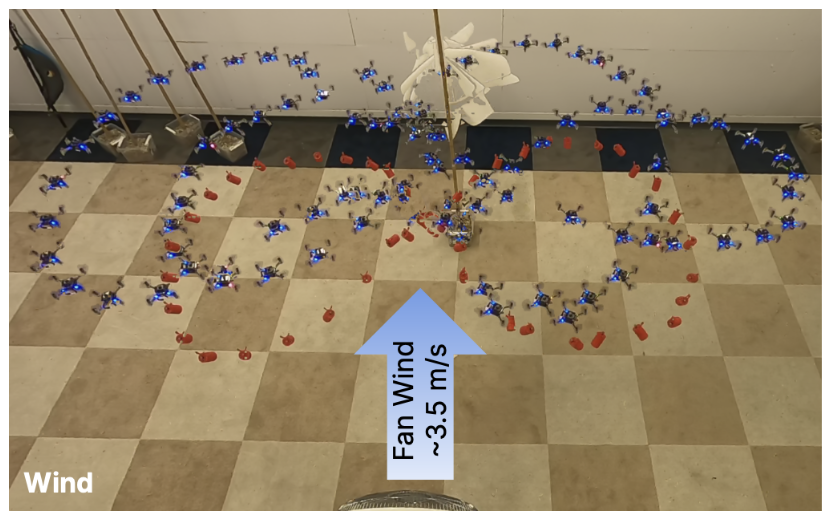
title={CrazyMARL: Decentralized Direct Motor Control Policies for Cooperative Aerial Transport of Cable-Suspended Payloads},
author={Lorentz, V. and Wahba, K. and Auddy, S. and Toussaint, M. and Hönig, W.},
year={2025},
note={Preprint}
}
C.V. Braun, S. Auddy, M. Toussaint
Inductive Biases in Reinforcement Learning Workshop at RLC, 2025. Best Paper Award.
Paper |
BibTeX
@inproceedings{trajectory2025,
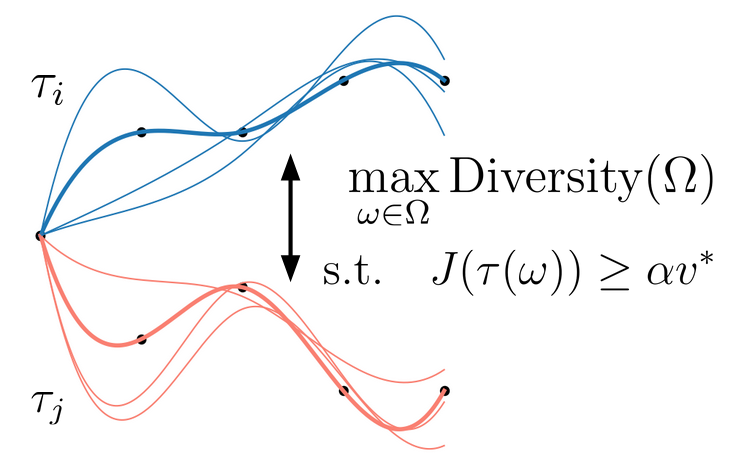
title={Trajectory First: A Curriculum for Discovering Diverse Policies},
author={Braun, C.V. and Auddy, S. and Toussaint, M.},
booktitle={Inductive Biases in Reinforcement Learning Workshop at RLC},
year={2025}
}
S. Auddy, A. Paolillo, J. Piater, M. Saveriano
Robotics and Autonomous Systems (RAS), 2025.
Paper |
BibTeX
@article{visualservo2025,
title={Imitation learning-based Direct Visual Servoing using the large projection formulation},
author={Auddy, S. and Paolillo, A. and Piater, J. and Saveriano, M.},
journal={Robotics and Autonomous Systems},
year={2025}
}
J. Josifovski, S. Gu, M. Malmir, H. Huang, S. Auddy, N. Navarro-Guerrero, C. Spanos, A. Knoll
Preprint, 2025.
Paper |
BibTeX
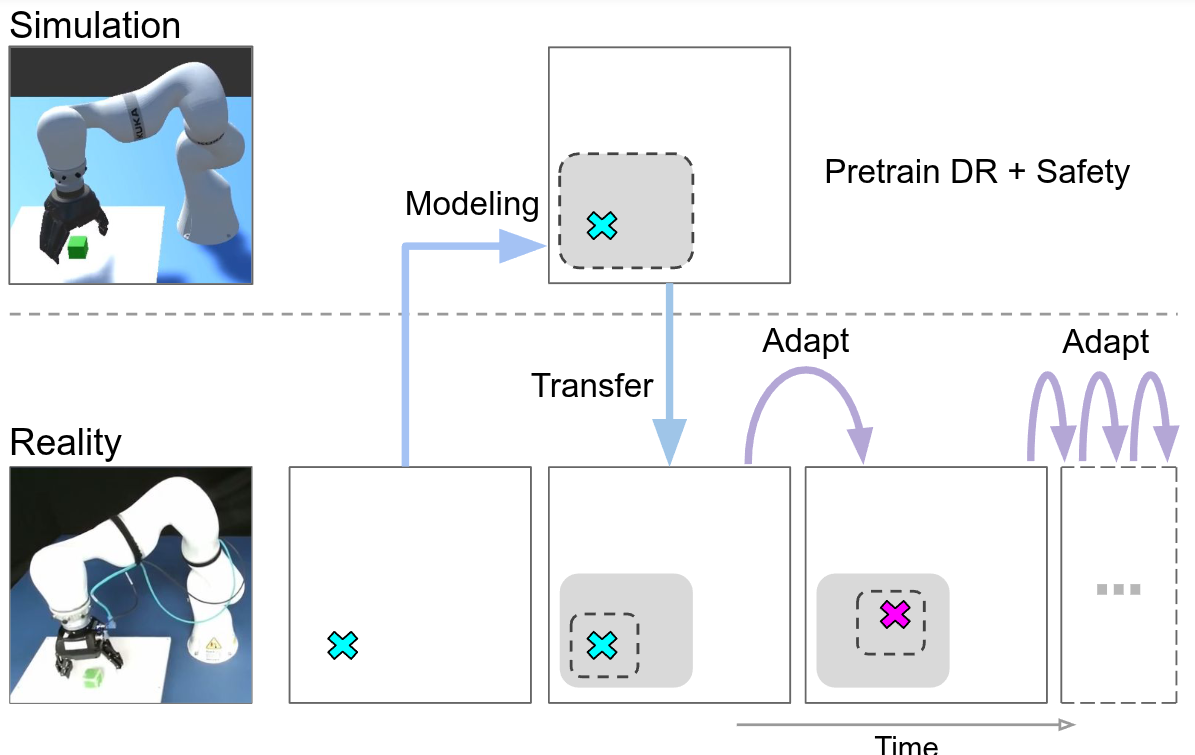
@article{safecda2025,
title={Safe Continual Domain Adaptation after Sim2Real Transfer of Reinforcement Learning Policies in Robotics},
author={Josifovski, J. and Gu, S. and Malmir, M. and Huang, H. and Auddy, S. and Navarro-Guerrero, N. and Spanos, C. and Knoll, A.},
year={2025},
note={Preprint}
}
J. Josifovski*, S. Auddy*, M. Malmir, J. Piater, A. Knoll, N. Navarro-Guerrero
International Conference on Intelligent Robots and Systems (IROS), 2024.
(* denotes equal contribution)
Paper |
BibTeX
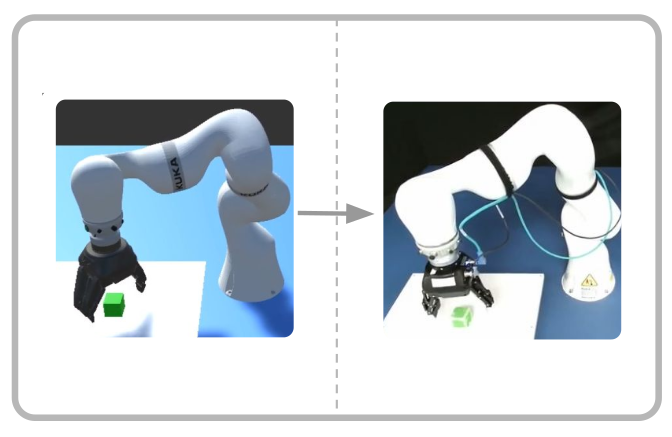
@inproceedings{domainrand2024,
title={Continual Domain Randomization},
author={Josifovski, J. and Auddy, S. and Malmir, M. and Piater, J. and Knoll, A. and Navarro-Guerrero, N.},
booktitle={IROS},
year={2024}
}
S. Auddy, J. Hollenstein, M. Saveriano, A. Rodríguez-Sánchez, J. Piater
Robotics and Autonomous Systems (RAS), Conference on Lifelong Learning Agents (CoLLAs), 2023.
Paper |
BibTeX
@article{cld2023,
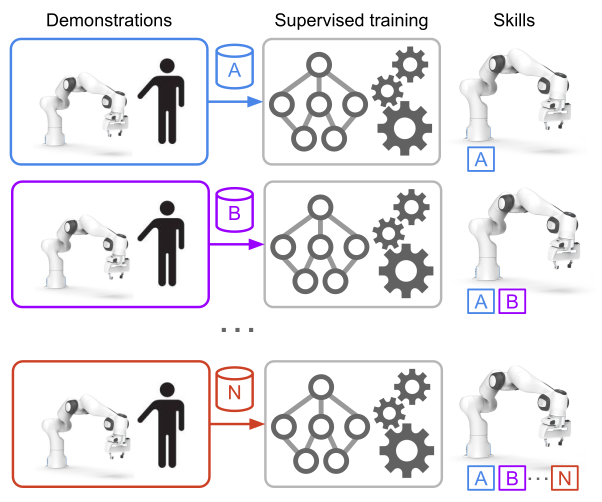
title={Continual Learning from Demonstration of Robotics Skills},
author={Auddy, S. and Hollenstein, J. and Saveriano, M. and Rodríguez-Sánchez, A. and Piater, J.},
journal={Robotics and Autonomous Systems},
year={2023}
}
J. Hollenstein, S. Auddy, M. Saveriano, E. Renaudo, J. Piater
Transactions on Machine Learning Research (TMLR), 2022.
Paper |
BibTeX
@article{actionnoise2022,
title={Action Noise in Off-Policy Deep Reinforcement Learning: Impact on Exploration and Performance},
author={Hollenstein, J. and Auddy, S. and Saveriano, M. and Renaudo, E. and Piater, J.},
journal={Transactions on Machine Learning Research},
year={2022}
}
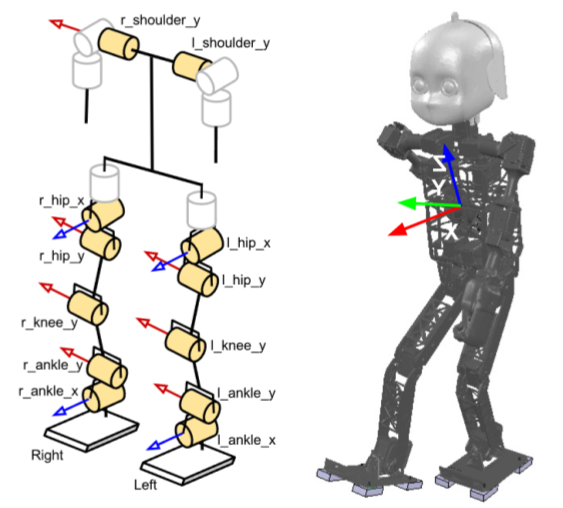
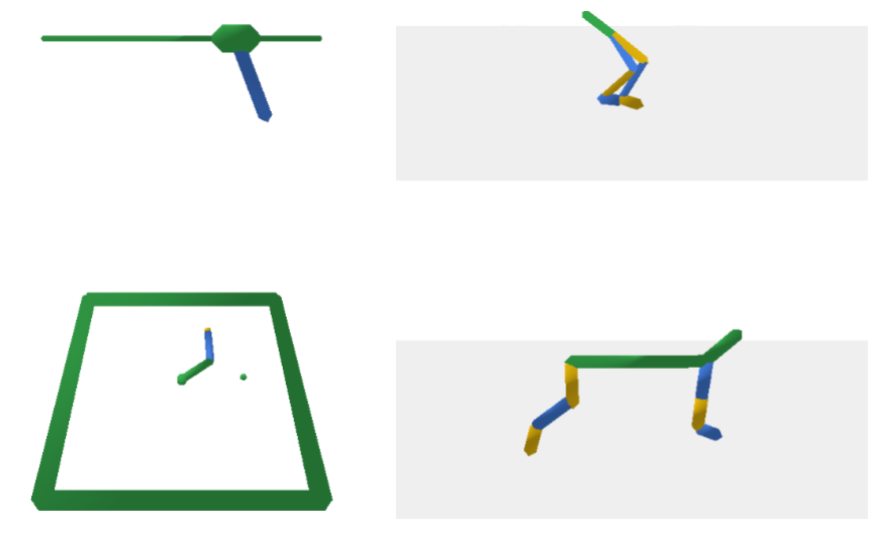
S. Auddy, S. Magg, S. Wermter
International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob), 2018. Oral.
Paper |
BibTeX
@inproceedings{hierarchical2018,
title={Hierarchical control for bipedal locomotion using central pattern generators and neural networks},
author={Auddy, S. and Magg, S. and Wermter, S.},
booktitle={ICDL-EpiRob},
year={2018}
}